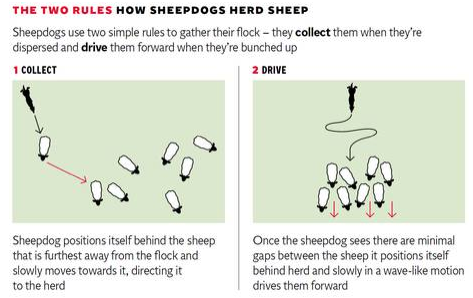
In a clever use of GPS and video technology, scientists have decoded the behavior that makes dogs so good at herding sheep. It turns out the dogs have two very simple rules - round 'em up when they're dispersed, and move them when they're together. (http://bit.ly/1vSiIIw)

The dog's-eye view
To figure out the "rules" the dogs use to herd sheep, the researchers developed a mathematical model - a "self-propelled particle model of local attraction-repulsion type" to model the way a shepherd would move a group of interacting animals towards a goal. By outfitting the dog and sheep with GPS trackers, the researchers could record the movements of every animal. They could then compare the model to the dogs behavior under different conditions to test how well it predicts the actual behavior of the dog and sheep.
The Guardian (http://ind.pn/1optWhQ)
This isn't just a dog (or sheep) problem. Many situations behave in similar ways but are very difficult to study such as oil spills and evacuation of people from smoke-filled buildings.
Strombom D, RP Mann, AM Wilson, S Hailes, AJ Morton, DJT Sumpter, & AJ King. 2014. Solving the shepherding problem- heuristics for herding autonomous, interacting agents. Journal of the Royal Society Interface 11:201407819 (pdf)
Strombom D, RP Mann, AM Wilson, S Hailes, AJ Morton, DJT Sumpter, & AJ King. 2014. Solving the shepherding problem- heuristics for herding autonomous, interacting agents. Journal of the Royal Society Interface 11:201407819 (pdf)

